技術ライブラリー





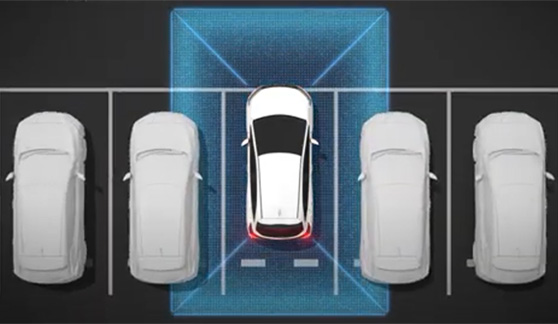
プロパイロット(ナビリンク機能、渋滞時ハンズオフモード、車線変更支援機能付)
車速調整や車線変更支援、渋滞時のハンズオフ走行で、高速道路でゆとりある運転を実現



日産 スケーラブル オープン ソフトウェア プラットフォーム
タイムリーな機能アップデートや新機能の追加を実現する、AIディファインドビークルを支える日産独自のSDVプラットフォーム

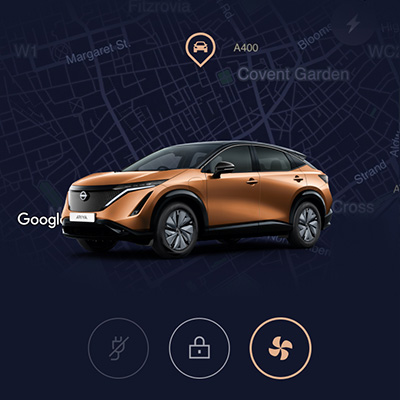
NissanConnectインフォテインメントシステム(Google搭載)
Googleのアプリやサービスをクルマにインストールすることで、スマートフォンなどで使い慣れたGoogleマップやGoogle アシスタント、Google Playなどの機能を、車内でお使いいただけます

プロパイロット 2.0 (Google搭載車)
ハンズオフ走行や車線変更支援まで、高速道路でドライバーを幅広くサポートする高度運転支援システム

















福島県浪江町でのモビリティ・エネルギーによるまちづくり貢献
モビリティとエネルギーの技術的イノベーションにより、持続可能な“まちづくり”の実現に貢献します。










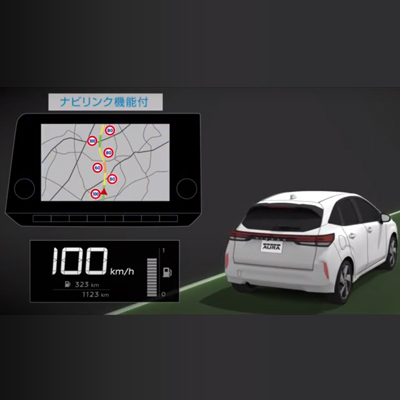
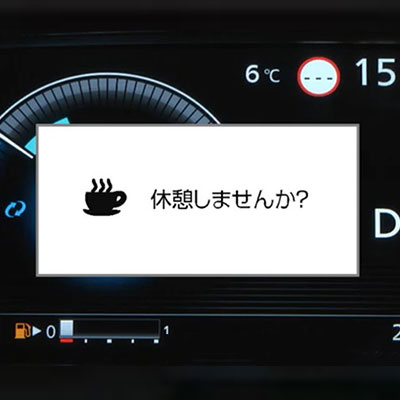
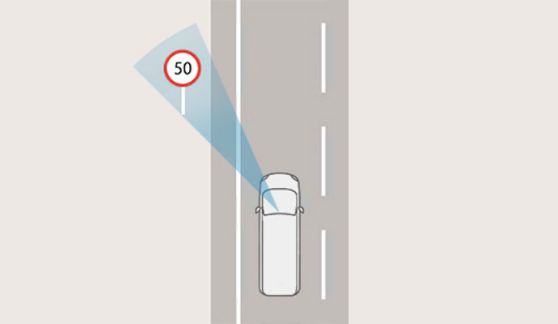
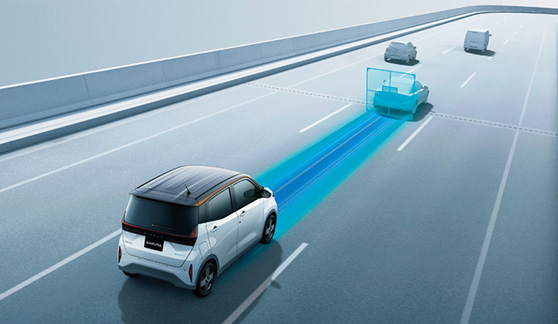
プロパイロット(ナビリンク機能付)
高速道路での同一車線走行時の運転操作をサポートするプロパイロットの機能に、ナビゲーションシステムとの連携機能を加えることで、ドライバーの操作頻度を低減し、ドライブをさらに安心かつ快適なものにします









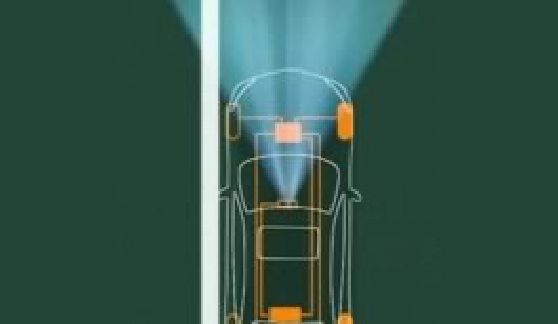


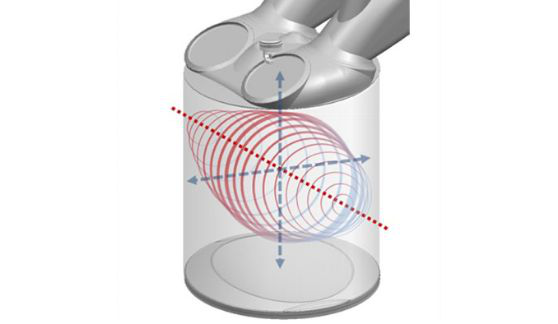
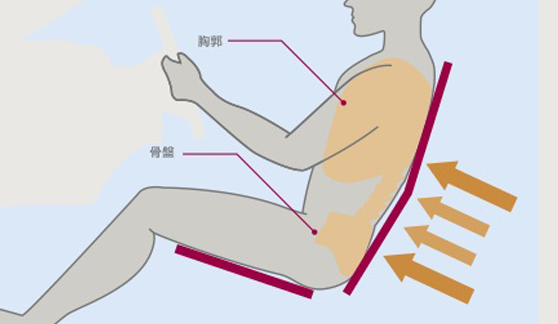
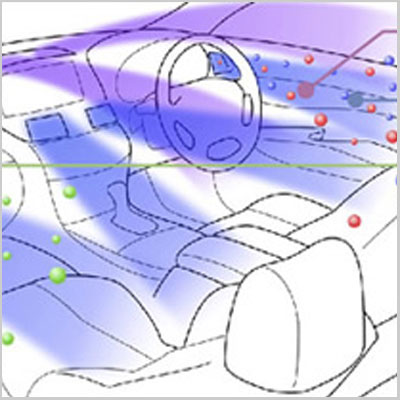
脳波測定による運転支援技術 (Brain-to-Vehicle)
ドライバーの脳波を検知し、リアルタイムにクルマの制御に活用することで、思い通りのよりエキサイティングなドライビングを提供します

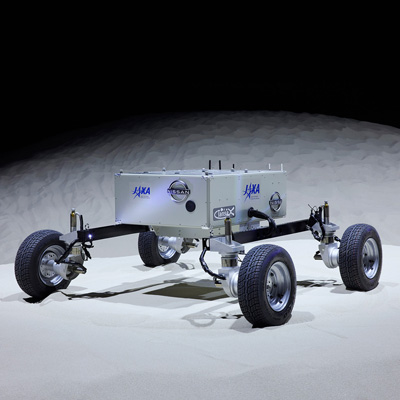
シームレスオートノマスモビリティ (SAM)
無人運転の早期実現に向けて、日産は「シームレス・オートノーマス・モビリティ (SAM)」と呼ばれるシステムをNASAと共同で開発しました。
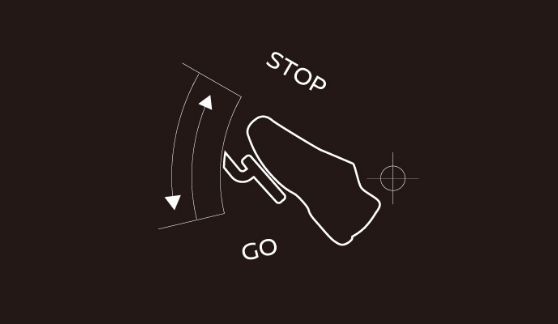




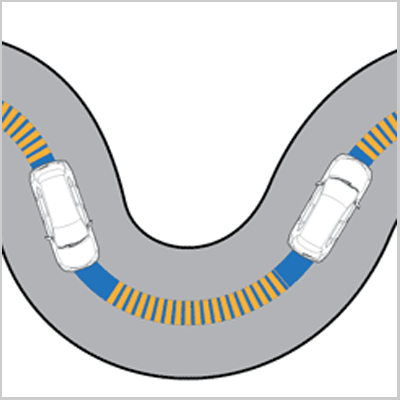







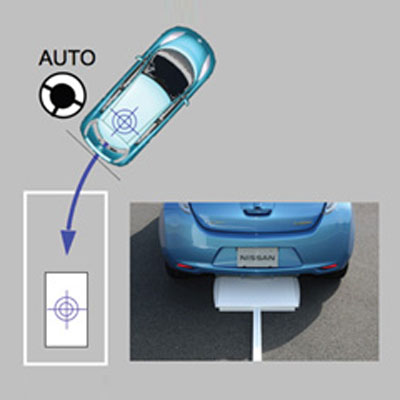












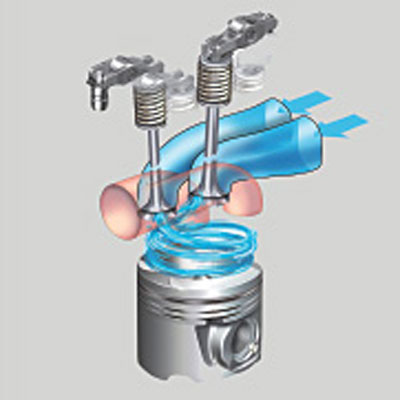
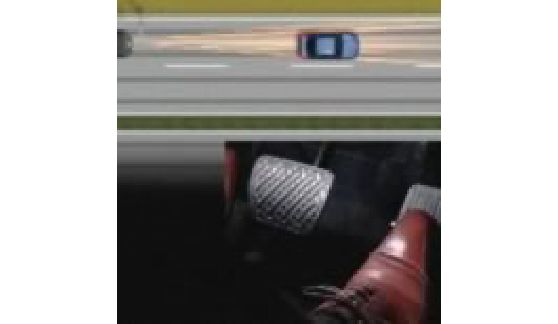
アドバンスドヒルディセントコントロール
エンジンブレーキや回生ブレーキだけでは十分な減速ができない、急勾配や雪道のような滑りやすい路面を下るとき、クルマが一定の低車速を保つように自動的に車速を制御します。だから、ドライバーはハンドル操作に集中できて安心して下ることができます。
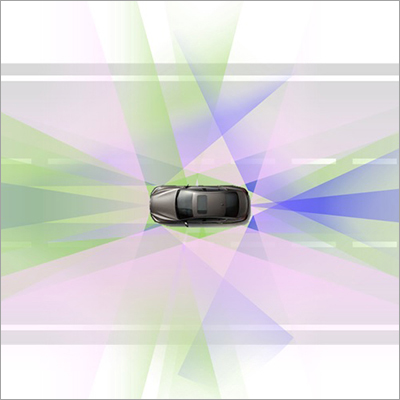
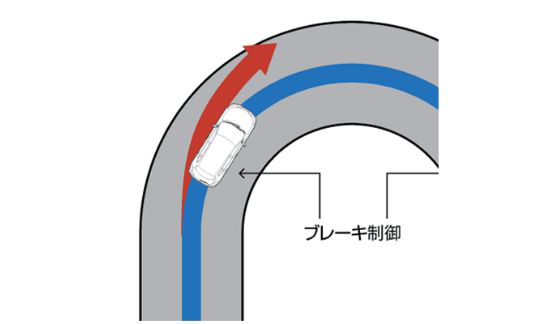
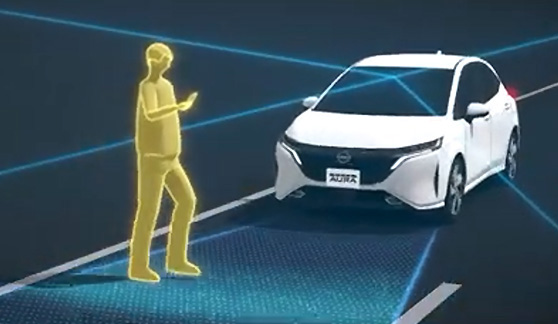
VDC(ビークルダイナミクスコントロール)
ドライバーの運転操作やクルマの速度を検知して、ブレーキやエンジン出力の制御を自動的に行い、滑りやすい路面やカーブを曲がるときや障害物を回避するときにクルマの横滑りを軽減し、運転するあなたに安心感を与えます。


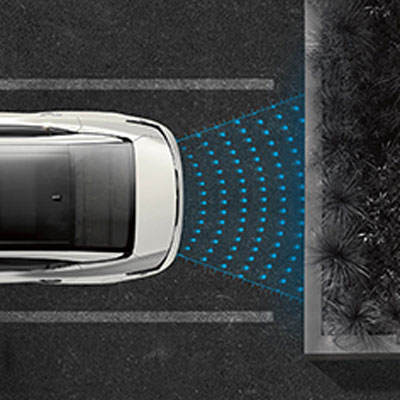
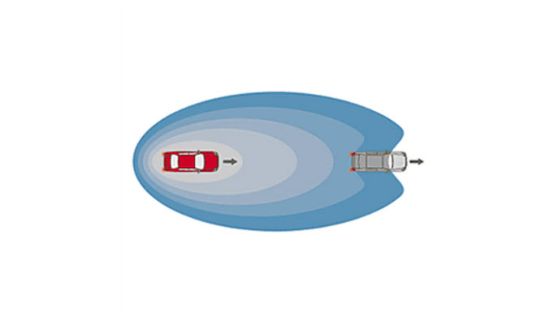
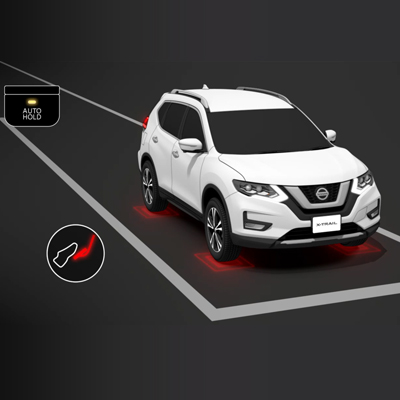
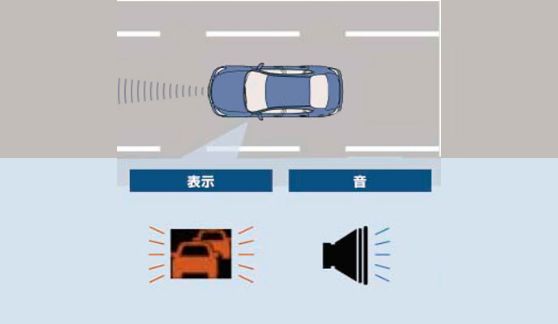
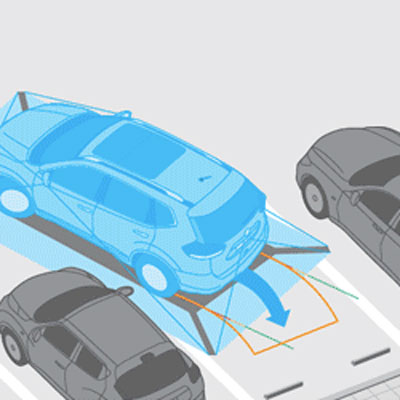
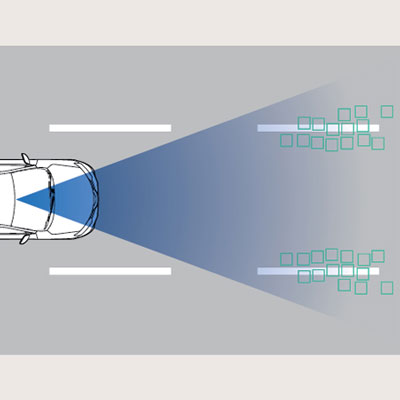
インテリジェントブレーキアシスト
センサーにより追従中の先行車との距離を測定。ほぼ真後ろから先行車に追突する恐れのある時、またはドライバーによる緊急の回避操作が必要と判断した場合は警報を鳴らします。さらにドライバーによる操作でも追突が避けられない場合、自動的にブレーキをかけて減速し追突時の被害を軽減します。
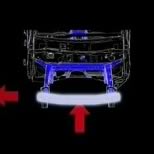
アクティブスタビリティーアシスト
VDCシステムを利用して、車両の動きを滑らかにし、運転操作をスムーズにおこなえるよう開発された技術。
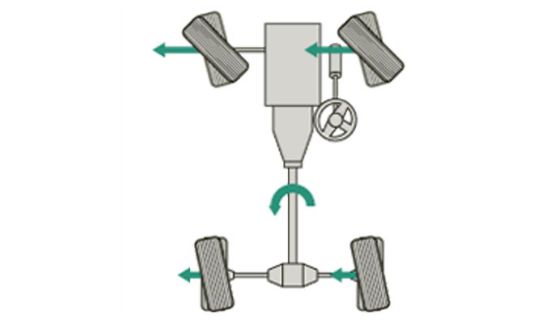
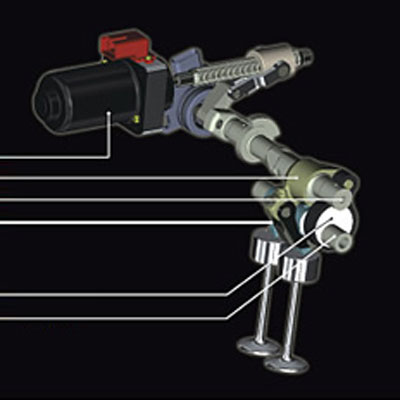
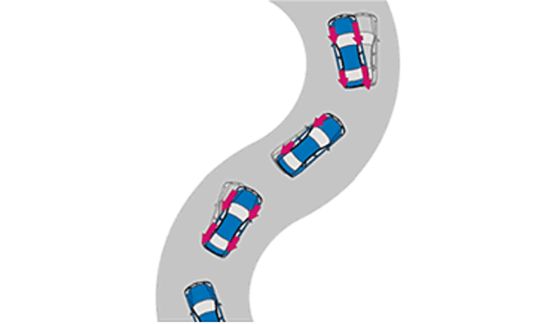
4輪アクティブステア(4WAS)
ステアリングの操作と車速に合わせて、前と後のタイヤの切れ角を調整するシステム。高速での安定性と応答性を向上し、低速でのステアリング操作負荷を軽減します。