
Invisible-to-Visible (I2V)
Invisible-to-Visible(I2V)は、リアル(現実)とバーチャル(仮想)の世界を融合した3Dインターフェースを通じてドライバーに見えないものを可視化し、究極のコネクテッドカー体験を生み出します。 また、Invisible-to-Visibleは、仮想世界の「メタバース」とつながることでサービスやコミュニケーションの可能性を無限大に広げ、ドライビングをより便利で快適、エキサイティングなものにしていきます。 日産は、2030年代の実用化を目指し、研究開発を進めています。
この技術による利点は次の二つです。
-
ドライバーはより自信を持って運転を楽しむことができます
車内外のセンサーが収集した情報とクラウド上のデータを統合することで、クルマの周囲の状況を把握するだけではなく、クルマの前方の状況を予測したり、通常では見ることができない建物の裏側やカーブの先の状況をドライバーの視野に投影したりすることを可能とします。 -
車内で過ごす時間をより快適で楽しいものにしていきます
仮想世界「メタバース」とドライバーや乗員がつながることで、離れた場所にいる家族や友人などが3DのAR(拡張現実)アバターとして車室内に現れ、一緒にドライブしたり運転をサポートしたりすることを可能とします。
- メタバース:インターネット上に構築された、人々が様々な方法や形態で自由に交流できる仮想世界。AR/VR/MR/XRなどの技術を用いることで、メタバースはデジタルの世界と現実世界をつなぐことを可能とする。Invisible-to-Visibleはメタバースにつながり、ドライバーや乗員をメタバースで活動する人々とつなげることができる。
技術の働き
Invisible-to-Visibleは、通常の方法では物理的に目に見えないものを可視化することによって、これまでにない新しい体験や双方向コミュニケーションを実現します。
1. 見えないものを可視化し、ドライビングをサポートします
日産独自のOmni-Sensing(オムニ・センシング)技術によって収集した情報やクラウド上に存在する情報、シミュレーションの結果得られる少し先の未来の情報など、通常では見えないものをドライバーの視野に重ねて投影します。
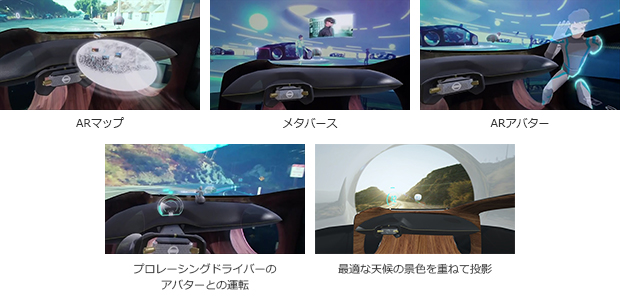
- 通常走行時には、見通しの悪い交差点の様子や建物の陰に隠れた歩行者などを映し出します
- 渋滞時には、渋滞の先頭で何が起きているのかを見ることができ、どの車線を走行するのが最適かを知ることができます
- 満車になっている駐車場では、どのくらい後にどの駐車スペースが空くという情報が表示されます
- カーブが連続する山道では、見えないカーブの先や対向車を可視化して投影します
- 自動運転の際、雨天時に窓から見える雨模様の景色に快晴の景色を重ねて映し出すことで、快晴の中を走行しているかのような体験を提供できます
2. 見えない人を可視化し、これまでにない双方向コミュニケーションを実現します
仮想世界「メタバース」のユーザーを3Dのアバターとして現実世界(車室内)にMR(複合現実)で表示することで、双方の世界のユーザーがリアルタイムに空間と移動体験を共有します。
- プロドライバーをメタバースから呼び出し、そのアバターからドライビングのレッスンやガイドを受けることができます
- 初めての場所に行くときには、メタバースで活動する現地に詳しいローカルガイドを探し、そのアバターに車内で観光案内をしてもらうことができます
- 遠く離れた友人や家族などをアバターとして同乗させ、会話しながら移動を楽しむことができます
- 移動時間が長い場合には、語学の講師をメタバースから呼び出してレッスンを受けたり、ビジネスやプライベートのコンサルティングやカウンセリングを受けることもできます
技術の仕組み
「I2V」は日産独自のOmni-Sensing(オムニ・センシング)技術を活用します。車両が走行している交通環境は「SAM (Seamless Autonomous Mobility) 」、車両の周囲は「プロパイロット」、車内環境については車室内センサーがリアルタイムに把握し、「I2V」に不可欠な全方位の情報収集を行います。そして、Omni-Sensing(オムニ・センシング)が収集した現実世界の大規模な情報をリアルタイムにデジタル空間に取り込み、デジタル・ツインを形成します。
デジタル・ツインはウェブを介して他の仮想空間とも繋がることで、人々が自由に交流し、コミュニケーションを行う仮想世界「メタバース」を形成します。
ドライバーや乗員はARゴーグルを着用することで、以下のような情報提供を受けたり、双方向コミュニケーションを体験することができます。
- 走行中に収集した様々な情報やバーチャルの世界の情報を、3DやAR(拡張現実)の情報としてドライバーの視野に投影します。必要に応じて、シミュレーションの結果得られる少し先の未来の情報、あるいはクラウドから得られた過去の情報などもドライバーの視野に重ねて投影します。
- 「メタバース」につながることで、ドライバーや乗員を仮想世界で活動する人々とつなげます。メタバースユーザーを現実世界(車両)に投影(Bit-out)すると同時に、現実世界(すなわち車室内)のユーザーをメタバース側に投影(Atom-in)することで、双方の世界のユーザーが空間と移動体験を共有することができます。
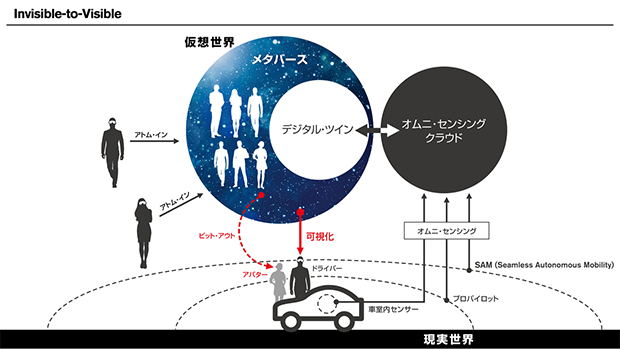
デジタル・ツイン:Omni-Sensing(オムニ・センシング)を通じて、現実世界の大規模な情報をリアルタイムにデジタル空間に取り込み、仮想世界に現実世界を再現したもの。