




















インテリジェント クルーズコントロール
前方車両との車間距離を保って走行し、ドライバーの運転負荷を軽減します
インテリジェント
クルーズコントロールは、先行車との距離を測定し、運転者がセットした車速を上限として、システムがアクセルとブレーキの操作を行い、車速に応じた車間距離を保ちながら走行します。
これにより、高速走行時のドライバーの運転負荷を軽減します。

高速時や渋滞時に前を走っているクルマとの距離を一定に保つようスピードをコントロールするので、ドライバーのアクセル操作が楽になります。
技術の働き
自車線前方の走行車両をセンサーが検知しているときは、ドライバーがセットした車速を上限として、車速に応じた車間距離を保ちながら走行するようにシステムがアクセルとブレーキを制御します。先行車両が停止したときには、自車もそれに応じて停止し、停止後はシステムが自動的に解除されます。
車間制御中に、先行車両の減速度合いが大きい場合や、他車の割り込みなどによって、十分な減速ができない状態で先行車両に接近したときは、表示と音でドライバーに注意を促します。
自車線前方の走行車両をセンサーが検知していないときは、ドライバーがセットした車速で定速走行します。
スカイラインなどの一部車種には、ナビゲーションシステムからの情報をもとに、ドライバーがセットした車速を上限として、前方のカーブの大きさに応じて自車の車速を制御するナビ協調機能があります。

技術の仕組み
車両前方に設置されたレーダーセンサー、またはフロントカメラで自車線前方の走行車両を検知し、前車との距離を測定することで、システムがアクセルとブレーキを制御します。

関連技術

インテリジェント 4×4
ドライバーが期待するコーナリングラインをクルマが予測し、滑りやすい路面でも自然で滑らかなコーナリングラインを実現します

インテリジェント BSI(後側方衝突防止支援システム)
車線変更時の斜め後方の車両との接触回避をアシストします
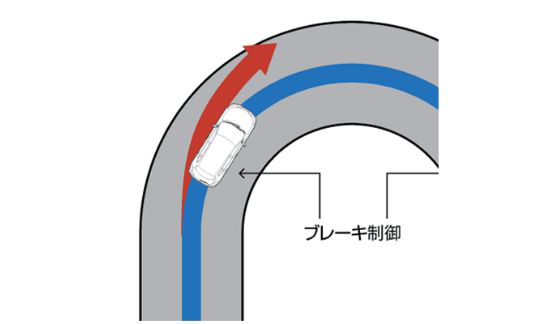
インテリジェント トレースコントロール
楽しく、自信を持ってコーナーを曲がることができます
e-Pedal
アクセルペダルを操作するだけのイージードライビングを実現します