
e-4ORCEを応用した月面ローバの駆動力制御技術研究
JAXAと共同研究を行い、過酷な環境の月面におけるローバの走破性向上を目指しています
日産は、国立研究開発法人宇宙航空研究開発機構(以下、JAXA)と、砂地等の過酷な環境下における月面ローバの走破性の向上を目指す共同研究を実施しています。 JAXA宇宙探査イノベーションハブ*1では、宇宙探査に必要な技術の一つとして月面ローバの研究が行われています。月面は砂地や起伏など路面環境が過酷であり、走行用のエネルギーも限られるため、月面ローバは様々な路面環境における高い走破性や、高効率な走行性能が求められます。日産は2020年1月から共同研究に参画し、量産電気自動車開発で培ってきたモーター制御技術と、電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAと共に研究を進めています。

電動駆動制御によって卓越した走行性能の実現を目指す
日産は誰もが安心して意のままにクルマを運転できることを目指して、過去より操縦安定性能を追求してきました。そして現在、電動駆動ならではの4輪制御技術開発を進め、どのような環境下においてもドライバーが不安を感じることなく運転でき、さらには車両姿勢を制御することにより同乗者にも快適な乗り心地を提供する「e-4ORCE」を開発しました。
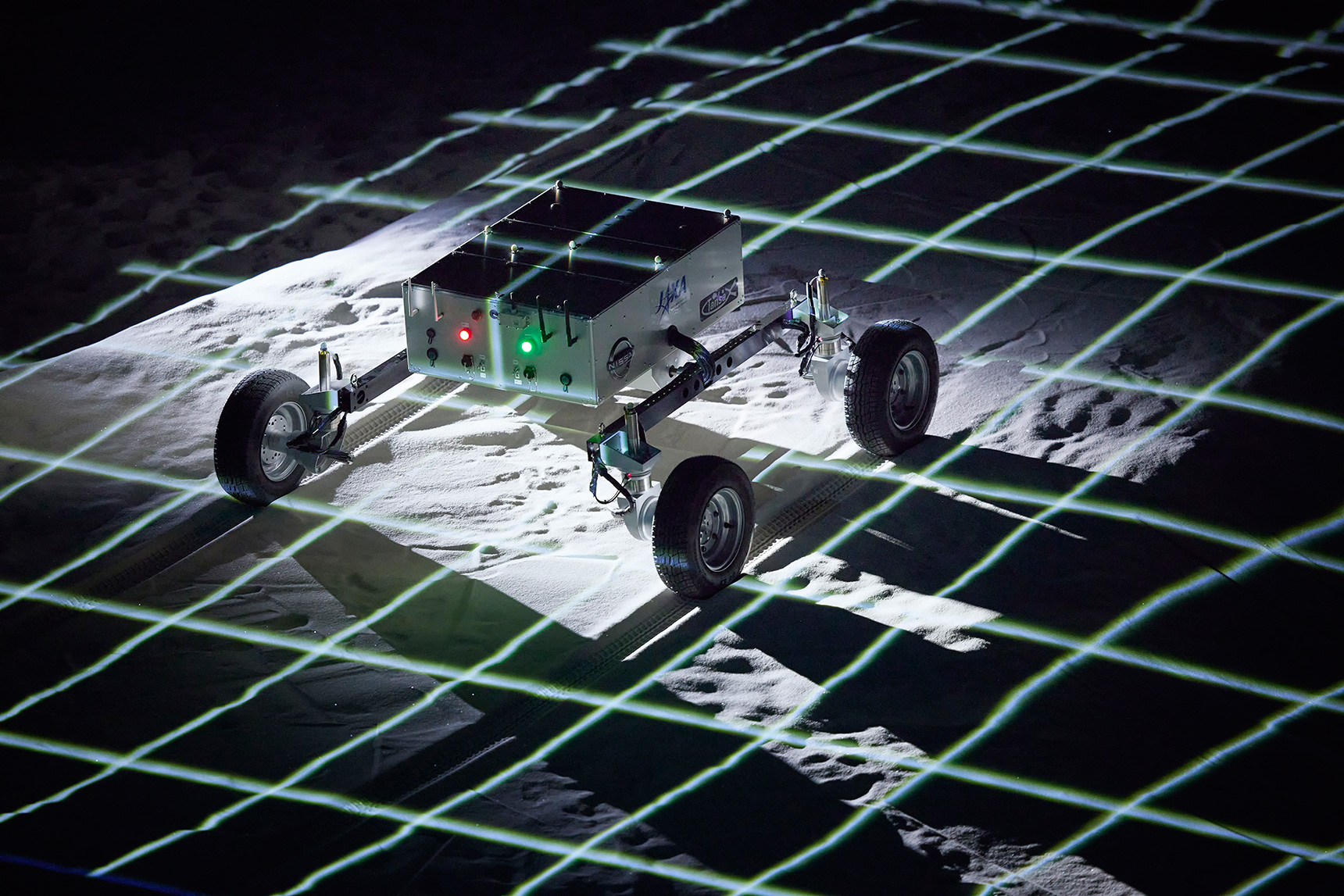
JAXAとの共同研究では、この「e-4ORCE」を更に進化させ、砂地などの過酷な環境下において走行性能を高める技術開発を行っています。砂漠などの砂地をクルマが走行する際に、タイヤが空転し砂に潜ることで脱出困難な状態(スタック)に陥ることがあります。このような事態を回避するためには、ドライバーがタイヤの空転量を繊細にコントロールする必要がありますが、非常に高い技量が求められます。
本研究では、路面状況に応じてタイヤの空転量を最小限に抑え、様々な路面環境において走行性能を高める駆動力制御を研究・開発しています。そして、タイヤの空転量を最小限に抑えることは、砂地でのスタックを回避できるだけではなく、空転によるエネルギーロスを最小化することにもつながり、結果として走行エネルギーを効率化することもつながります。過酷な環境下での走行性能を高めることと、走行エネルギーを効率化することは、月面で走るローバだけでなく、地上で走る車にも求められる要件です。
この共同研究を通じ、実車のテストカーの開発で得た日産の知見と、ローバの研究で得られたJAXAの知見を互いに共有することで、地上技術と宇宙探査技術の両面での技術進化に貢献することを目指しています。

- JAXA宇宙探査イノベーションハブの取り組みは、様々な分野の人材や知識を集めた組織を構築し、日本発の宇宙探査におけるGame Changing(現状を打破し、根本的にものごとを変えること)を実現する技術を開発することで、宇宙探査の在り方を変えると同時に、地上技術に革命を起こすことを目指したものです。
関連技術
e-4ORCE
e-4ORCEは、前後2つの高出力モーターとブレーキの統合制御により、駆動力を自在にコントロールする電動駆動4輪制御システムです。