
e-4ORCE
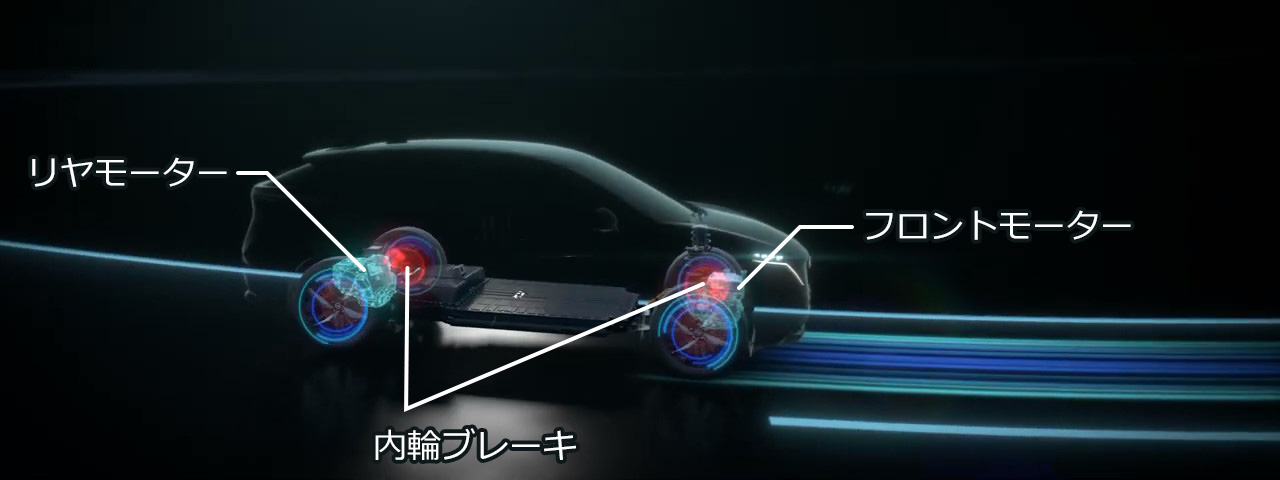
e-4ORCEは、前後2つの高出力モーターとブレーキの統合制御により、駆動力を自在にコントロールする電動駆動4輪制御システムです。
e-4ORCEは、これまで日産が培ってきた4WD制御技術、シャシー制御技術に、電動化技術が加わることで誕生した革新的な駆動システムで、100%モーターで駆動するEV、e-POWERの走りをさらに高いレベルに引き上げます。
日常走行からワインディング、すべりやすい路面まで、あらゆる走行をレベルアップさせ、力強くも上質で意のままの走りを提供します。
技術の働き
状況に合わせて4輪の駆動力を自在に制御し、上質で意のままの走りを提供します。
[コーナリング時]
時々刻々変化する走行状況や路面状況に応じ、ドライバーの操作に対応した旋回、加減速を実現するための駆動力を算出し、前後のモーターと左右のブレーキで4輪の駆動力ををコントロールします。これにより、日常の走行からすべりやすい路面での走行まで、意のままの走りを実現します。
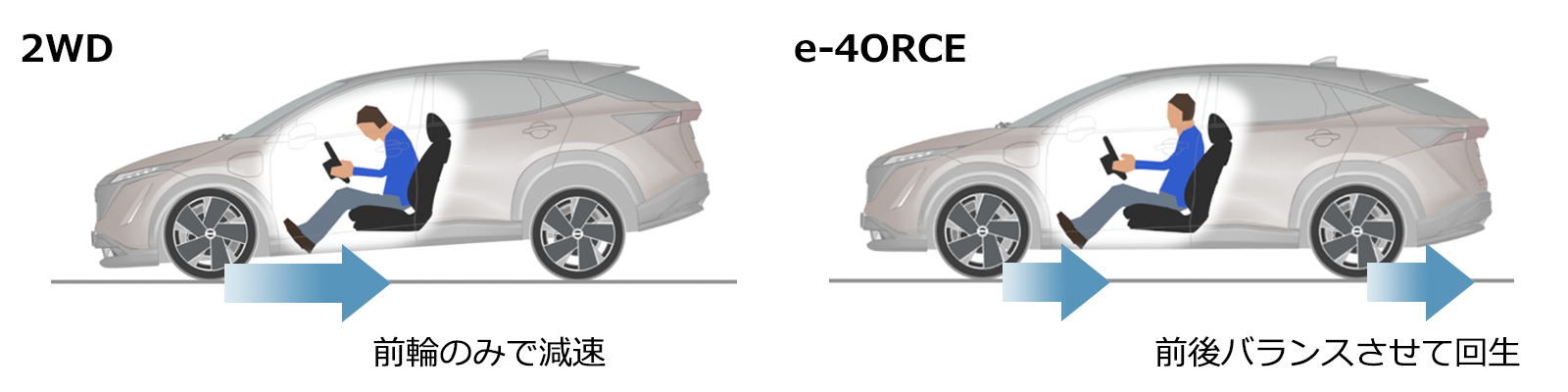
[減速時]
アクセルをもどせば前後2つのモーターでバランスよく回生し減速させます。これにより、前輪のみで回生の場合に発生する車体のピッチング挙動を抑え、フラットでなめらかな減速を実現、同乗者にも快適な乗り心地を提供します。また各輪のすべり度合を常にモニタリングし、すべりやすい路面では回生量を自動的にコントロールします。
[発進時]
ドライバーのアクセル操作に対して高精度にトルクを制御できるモーターならではの特性を生かし、アクセルを踏み込むとなめらかにタイヤを駆動、すべりやすい雪の坂道でもスムーズで力強い発進を実現します。各輪のわずかなすべりを検出し、スリップが発生した場合には、すばやく駆動力を分散させます。
技術の仕組み
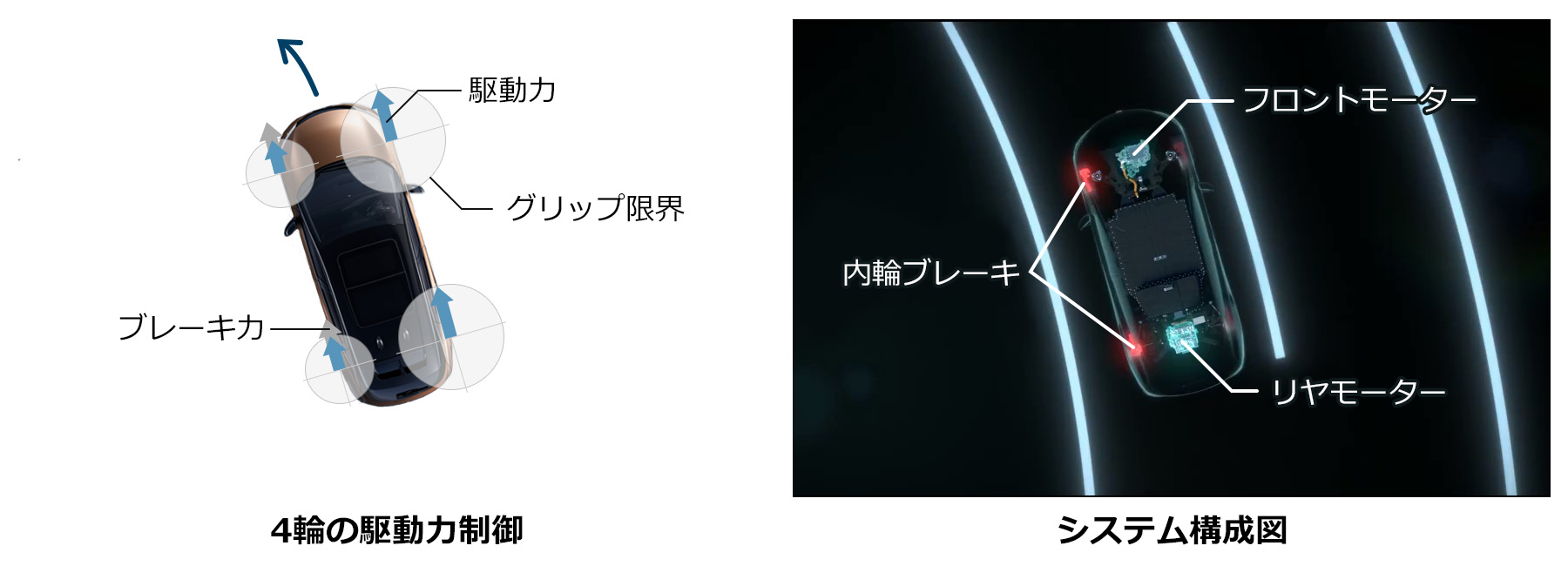
タイヤのグリップ限界は、走行状況や路面状況により、時々刻々変化し、また各輪でも異なります。
e-4ORCEはタイヤのわずかなすべりを検出し、グリップ限界を見極めながら走行します。ドライバー操作に応じた旋回、加減速を実現する駆動力を算出し、前後のモーターと左右のブレーキを統合して制御することで、4輪のグリップ力を最大限に生かすよう駆動力をコントロールします。
従来の機械式四駆が、構造上50:50までしか駆動力配分を変えられないのに対し、前後輪それぞれにモーターを持つ四駆システムは100:0~0:100まで自在に駆動力を変えられるポテンシャルがあります。これにブレーキ制御を組み合わせることで左右の駆動力を変え、4輪の駆動力を高速・高精度にコントロールします。
関連技術
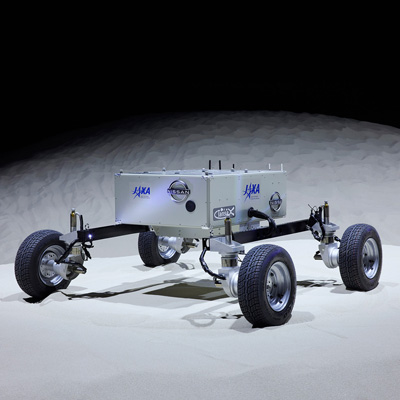
e-4ORCEを応用した月面ローバの駆動力制御技術研究
JAXAと共同研究を行い、過酷な環境の月面におけるローバの走破性向上を目指しています